Типы электродвигателей и принципы работы
Разновидности электромоторов
Явление электромагнитной индукции стало основой возникновения и развития всех электрических машин. Первооткрывателем этого явления в конце 19 века был Майкл Фарадей, английский учёный — экспериментатор. Он провёл опыты с первыми электрическими машинами. Сейчас без них невозможно представить нашу жизнь. Электродвигатели стали одними из самых распространённых электрических машин.
Для работы электромотора необходимо напряжение, свойства которого определяют его конструкцию. На переменном напряжении и токе работают такие электродвигатели:
на постоянном напряжении и токе работают:
- коллекторные;
- униполярные;
- шаговые.
Синхронные и асинхронные электродвигатели
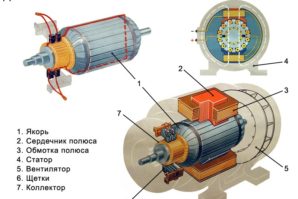
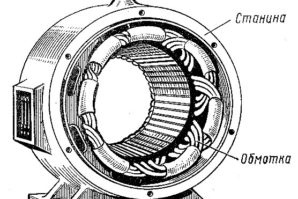
Синхронные и асинхронные электромоторы имеют общие условия для своей работы. Для этого необходимо магнитное поле, максимальная величина которого перемещается в пространстве. Такое поле может быть создано двумя или большим числом обмоток. Обычные конструкции синхронных и асинхронных электромоторов содержат две или три обмотки.
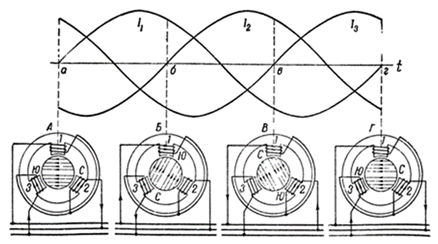
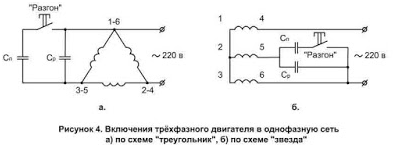
Они размещаются на массивных ферримагнитных сердечниках, усиливающих магнитное поле. Для трёх обмоток применяется трёхфазное напряжение, для двух обмоток – двухфазное или одна фаза с фазосдвигающим конденсатором. Но с таким конденсатором к однофазной сети можно подключить и трёхфазные двигатели.
 |
 |
Если ротор электромотора создаёт постоянное магнитное поле, либо от постоянных магнитов, либо от встроенного в ротор источника питания постоянного тока, либо от внешнего источника питания постоянного тока через кольца со щётками такой двигатель является синхронным. В нём частота оборотов и частота напряжения источника питания одинаковы. В асинхронных двигателях используется немагнитный ротор без явно выраженных полюсов, колец со щётками, встроенных выпрямителей и комбинированных деталей из различных материалов. Исключением является синхронный гистерезисный двигатель.

Ротор асинхронного двигателя работает как вторичная обмотка трансформатора, которая замкнута накоротко. Но ток в его роторе может возникнуть только при более медленном вращении в сравнении с магнитным полем статора. Такое различие скоростей называется скольжением. Простота конструкции и соответствующая надёжность делают асинхронный электромотор наиболее широко используемым.
Коллекторные машины
Однако у синхронных и асинхронных электромоторов есть один непреодолимый недостаток – частота питающего напряжения. Она определяет скорость вращения магнитного поля и вала в этих двигателях. Никакими конструктивными изменениями в них при заданной частоте питающего напряжения невозможно получить частоту вращения вала большую, чем частота питающего напряжения. При необходимости большего числа оборотов используются коллекторные электромоторы.
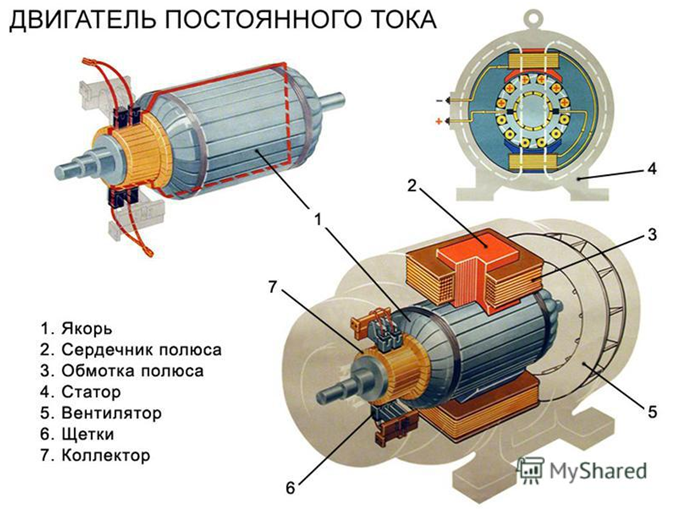
В этих двигателях происходит постоянное переключение обмоток ротора коллектором. Каждая обмотка по сути это рамка с током, которая, как известно из опытов Фарадея, поворачивается в магнитном поле. Но одна рамка повернётся и остановится. Поэтому рамок — обмоток сделано несколько и каждой из них соответствует пара пластин в коллекторе. Ток подаётся через щётки, скользящие по коллектору.
Конструкция такого электромотора позволяет работать от источника либо постоянного, либо переменного напряжения, который обеспечивает ток и в статоре и в роторе. При переменном напряжении направление тока в статоре и роторе изменяется одновременно и поэтому направление действия силы вращающей ротор сохраняется. Частота питающего напряжения никак не влияет на частоту вращения ротора. Она зависит только от величины напряжения, питающего электромотор. Скользящий контакт щётки с коллектором ограничивает возможности этих электродвигателей по сроку службы и месту применения, поскольку искрение в щётках довольно быстро разрушает скользящий контакт и недопустимо в условиях повышенной взрывоопасности.
Униполярные и шаговые варианты
Однако есть такие конструкции электромоторов постоянного тока, в которых коллектора нет. Это униполярные электромоторы.
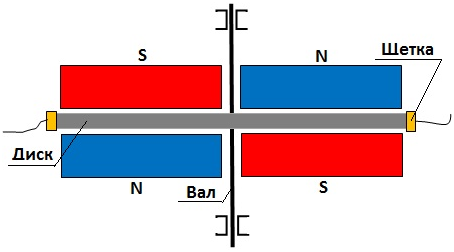
В этих электродвигателях ротор выполнен в виде диска, расположенного между полюсами постоянных магнитов. Щётки расположенные диаметрально противоположно питают током диск – ротор. Под воздействием силы Лоренца диск вращается. Несмотря на привлекательную простоту конструкции, такой электромотор не имеет широкого практического использования, поскольку требует слишком больших значений тока и магнитного поля. Тем не менее, существуют уникальные лабораторные разработки униполярных электромоторов со щётками из жидкого металла, которые развивают обороты немыслимые для иных конструкций двигателей.
Шаговый двигатель это ещё одна конструкция, работающая на постоянном токе.
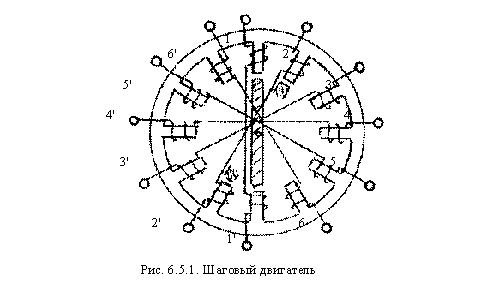
В целом этот двигатель подобен синхронному электромотору с ротором из постоянных магнитов. Отличие в том, что число обмоток здесь больше, и они управляются ключами, которые подают на каждую обмотку питающее напряжение. В результате ротор меняет своё положение, притягиваясь к подключенной обмотке. Число обмоток определяет минимальный угол поворота ротора, а коммутаторы – скорость вращения ротора. В шаговом двигателе ротор может вращаться почти как угодно, поскольку ключи связаны с электронной схемой управления.
Рассмотренные конструкции электромоторов являются базовыми. На их основе для решения определённых задач создано много специальных разновидностей электромоторов. Но это уже совсем другая история…