Частотный преобразователь для электродвигателя
Во всем мире с успехом реализуются принципы частотного управления асинхронным электроприводом. Способ предусматривает кроме значительной экономии электроэнергии, усовершенствованное управление работы агрегатов, и ведет к существенному энергосбережению.
Принцип действия
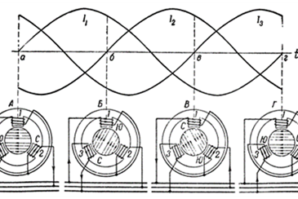
Скорость вращения вала электродвигателя зависит от частоты подаваемого питающего напряжения. Использование частотных преобразователей повсеместно признано самым эффективным методом регулировки скорости вращения. Действие устройства заключается в формировании из значения выходного напряжения (U), характеризуемого постоянной частотой (F) и амплитудой (A), в напряжение с переменными параметрами. Это приводит к изменению величины частоты магнитного поля, изменяющего механическое вращение вала двигателя.
Принимая во внимание, что момент нагрузки постоянен, сила тока зависит от нагрузки, соответственно, происходит изменение подаваемого на клеммы двигателя напряжения пропорционального частоте, это сохраняет неизменным поток намагничивания и постоянный крутящий момент, а также неизменное значение тока.
Как следствие этих процессов, наблюдается постоянная корректировка скорости и вращающего момента в отношении рабочей нагрузки. Потери – минимальны, это достигается при помощи поддержания постоянного скольжения при любой скорости, для всех нагрузок.

Преимущества способа частотного регулирования
- Управление электродвигателем может осуществляться на значительном расстоянии в удобном для этого месте.
- Мягкий пуск и уменьшение затрат на техническое обслуживание устройства.
- Возможность увеличивать производительность с помощью регулирования скорости, в соответствии с требуемой производственной потребностью.
- Повышенный КПД преобразователя частоты до 97% асинхронной машины и до 95% повышает энергоэффективность за счет способа управления и применяемого электродвигателя.
- Статический преобразователь применяется для переменного момента (невысокий крутящий момент, небольшие скорости) с уменьшенной величиной напряжения на клеммах присоединения к электродвигателю. Также, для использования в случае неизменного момента и мощности, в таком случае высокая эффективность достигается за счет плавного управления скоростью. Благодаря этим возможностям система может считаться универсальной.
- Обязательный контроль скорости способствует достижению оптимизации технологического процесса, что способствует высокому качеству продукции.
Характеристики
Для регулировки рекомендуется применить выходное ШИМ напряжение. Устройство служит промежуточным звеном с возможностью управления расположенное между сетевым напряжением и машиной асинхронного типа.
Сигнал заданного значения напряжения и определенной частоты, получается по прохождении трех этапов – это:
- Выпрямительный диодный мост.
- Фильтр постоянного тока для осуществления сглаживания уже выпрямленного значения напряжения при помощи конденсаторов.
- Инвертор или силовой модуль, работающий на базе IGВT (БТИЗ – биполярный транзистор с изолированным затвором). Этот силовой транзистор может использоваться в качестве ключа со значительным рабочим током в несколько кило-ампер, и с величиной напряжения в несколько киловольт с частотой коммутации более 30 кГц.
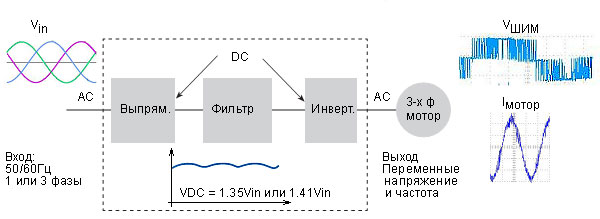
Рис №1. Три основных звена, из которых состоит устройство частотного преобразователя.
Типы частотного управления скоростью асинхронной машины
Существует два основных типа управления скоростью вращения, являющимися базовыми способами, это:
- Скалярное (без использования обратной связи).
- Векторное управление, обратная связь может применяться, а может отсутствовать.
Характеристика скалярного управления
При использовании этого типа управления, происходит сохранение соотношения U/F в неизменном виде по всему частотному интервалу для сохранения постоянного магнитного потока (Ф) электрического двигателя. Данный метод применяется при отсутствии надобности стремительного реагирования на колебания момента вращения и число оборотов.
Скалярное регулировании позволяет от одного частотного устройства запитать несколько рабочих асинхронных машин. При скалярном регулировании применяется компенсация скольжения за счет снижения скорости. Происходит увеличение постоянного момента вращения за счет повышения коэффициента V/F, это компенсирует понижение значения напряжения на статоре двигателя. Этот способ прост конструктивно и не нуждается в значительной точности и быстром реагировании на изменения числа оборотов вала.
Векторное управление двигателем
Увеличение эффективности в управлении рабочим приводом рекомендуется применить метод регулировки за счет изменения потокосцепления.
Самым точным и наиболее действенным считается метод векторного регулирования фазы тока в статоре машины и соответственно, фазой его магнитного поля относительно ротора. Для этого метода характерно применение датчика позиционирования или положения (энкодера), позволяющего показать точное положение ротора в каждый вращающий момент. Применение датчиков положения способно увеличить стоимость электропривода. С использованием энкодеров скорость можно регулировать с точностью до 0,01%.
Чтобы обойти такое ограничение рекомендуется применять в системе управления электродвигателем, преобразователь интегральных схем ASIC. Он создает адаптивную модель двигателя, выраженную математически с точным указанием величины токов, напряжений, сопротивления статора, индуктивность рассеивания на выходе. Делает возможным создание моделирования тепловых рабочих параметров двигателя при разных режимах работы.
Векторное управление без применения датчиков обратной связи способно обеспечить динамические погрешности, которые присутствуют в электроприводах с замкнутой обратной связью. Векторное управление без использования датчиков простое конструктивно, но весьма ограничено при использовании на невысоких скоростях, он отлично подходит для больших скоростей вращения.
Влияние токов высших гармоник
Важно: для сетей переменного тока система использующая преобразователь частоты служит нелинейной импульсной нагрузкой, где присутствуют токовые гармоники, отрицательно влияющие на качественные параметры линии электропередач в зависимости от значения сопротивления линии. Высшие гармоники обладают более низкой амплитудой и тем легче могут быть отфильтрованы.
Гармонические токи способствуют увеличению электрических потерь и снижение коэффициента мощности, способствуют перегреву элементов сети, например: кабелей, трансформаторов, двигателей, конденсаторов.
Сетевой дроссель или сглаживающий линейный реактор
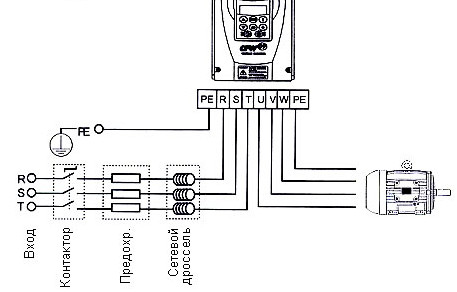
Для преобразователей частоты обязательно наличие фильтрующего устройства. Снизить гармонические искажения можно за счет применения сетевых дросселей или DC-реакторов. Дроссель препятствует снижению величины напряжения на электродвигателе и способствует повышению его коэффициента мощности. Недостаток дросселя, он может привести нежелательному резонансу в общей системе электроснабжения, это происходит за счет неправильно выбранной комбинации его сопротивления с сопротивлением линии.
Рекомендуется сопротивление сетевого дросселя добавлять к существующему сопротивлению источника питания. При этом учитывается сопротивление трансформаторов и кабельных линий, в этом случае падение напряжения составит 2-4% и послужит для улучшения коэффициента мощности и уменьшения гармонических искажений на выходном токе.
Также сглаживающий реактор улучшает коэффициент мощности и служит для подавления или ослабления высших гармоник. Реактор помогает увеличить срок эксплуатации полупроводников, конденсаторных батарей. За счет этого происходит снижение значения тока выпрямительных диодов и уменьшается пульсация тока через конденсаторы.
- Частотный преобразователь для электродвигателя
Рис №2. Сетевой дроссель (реактор).
Мероприятия, направленные на сглаживание гармоник
Для подавления радиопомех, которые генерируются инвертором, в частотном преобразователе используют фильтр радиопомех и модуль DBR, устройства используются для соответствия требованиям по электромагнитной совместимости.
Также для уменьшения гармоник используют многоуровневый преобразователь, что влечет некоторое увеличение стоимости оборудования, снижает надежность и усложняет управление. Хорошее решение этого вопроса можно наблюдать при улучшении качества ШИМ, выполняется оптимизация временной диаграммы – происходит: пространственно векторная модуляция, улучшается контроль напряжения, повышается эффективность системы (частотный преобразователь + электродвигатель)
Энергосбережение
Повышение КПД электрического двигателя достигается за счет увеличения частоты коммутации. При подключении от преобразователя, происходит сохранение КПД двигателя, по сравнению со стандартными двигателями.
Энергоэффективность достигается за счет снижения тепловых потерь и потерь в железе, это можно нормализировать при снижении скорости. Качество управления происходит вследствие исключения механических устройств, при которых возникают потери, и понижается надежность – это могут быть: заслонки, системы тормозов, задвижки и т. д.
Пишите комментарии, дополнения к статье, может я что-то пропустил. Загляните на карту сайта, буду рад, если вы найдете на моем сайте еще что-нибудь полезное. Всего доброго.